限时特价 :
¥800
原价 : ¥1000.00
限时特价
剩余名额
剩余名额
4




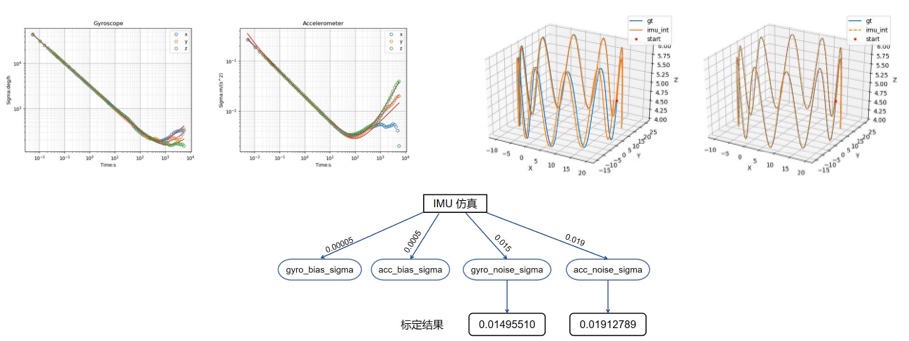
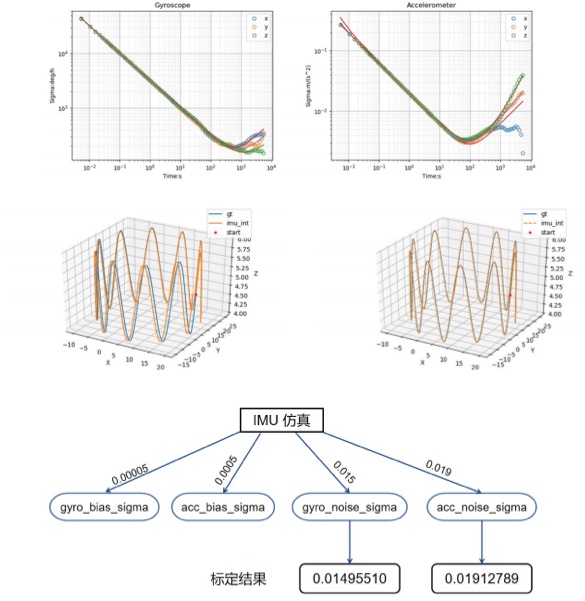
实践一:IMU仿真实践
设置IMU仿真代码中的不同噪声参数,然后运行imu_utils生成Allan方差标定曲线的结果,并比较欧拉积分和中值积分的效果。
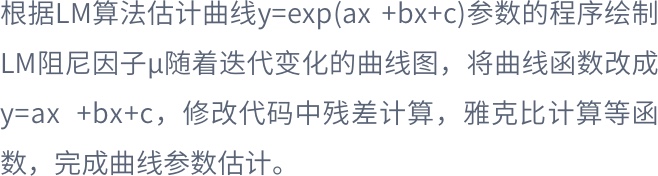
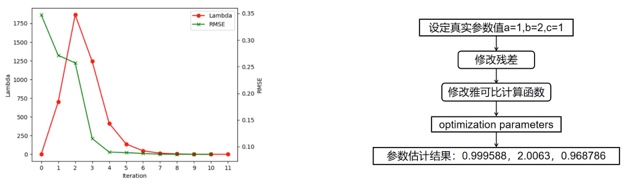
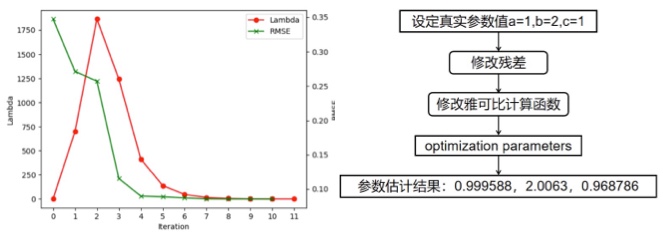
实践二:使用LM算法估计曲线参数

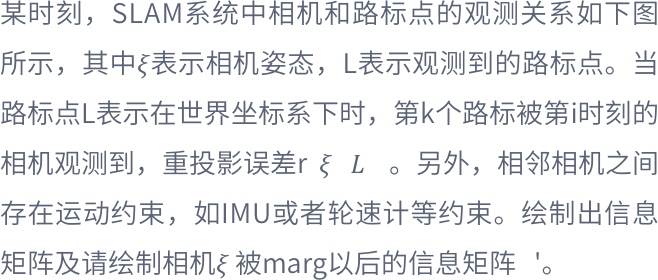
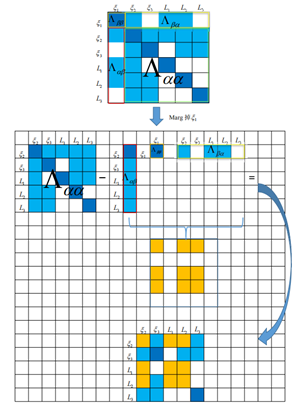
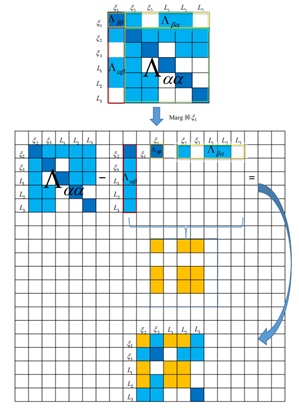
实践三:绘制信息矩阵

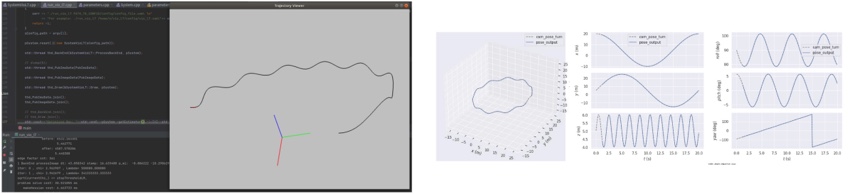
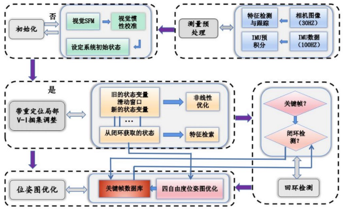
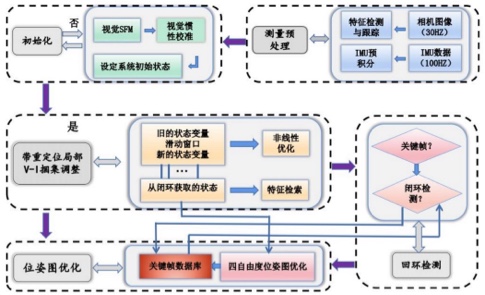
实践四:VINS系统构建
搭建一个最简单的VINS系统,包括三个部分:前端,数据处理:特征提取匹配,IMU积分;初始化:系统初始状态变量(重力方向,速度,尺度等等);后端:滑动窗口优化。
实践五:将IMU仿真数据接入到VINS系统中
将IMU仿真数据接入到VINS代码中,生成无噪声和有噪声情况的两种运行轨迹。